Senior Design
Powering up the PUMA Robots
Team Member:
Matthew Bogenschultz / Team Leader
Alex Grieve / Web Master
Nhat Pham / Communication
Zeyu Zhang / Ideas Keeper
Advisor/Client:
Dr. Grep Luecke
Objective:
Our client, Dr. Greg Luecke, has acquired two PUMA 500 robot arms, but the controllers have been damaged and/or lost. Our team objective is to develop a control system that will interact with the PUMA robot arm, which will replace the original controllers.
Team Website:
http://dec1408.ece.iastate.edu/documents.html
Matthew Bogenschultz / Team Leader
Alex Grieve / Web Master
Nhat Pham / Communication
Zeyu Zhang / Ideas Keeper
Advisor/Client:
Dr. Grep Luecke
Objective:
Our client, Dr. Greg Luecke, has acquired two PUMA 500 robot arms, but the controllers have been damaged and/or lost. Our team objective is to develop a control system that will interact with the PUMA robot arm, which will replace the original controllers.
Team Website:
http://dec1408.ece.iastate.edu/documents.html
EE 330 - Integrated Electronics
Elevator Controller Design
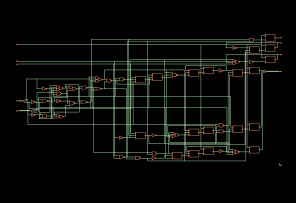
For our EE 330 Final Project, we chose to develop a design for an
eight-floor elevator. The inputs/outputs are shown below. The elevator displays
the moving direction and the current floor. In addition, the maximum weight in
the elevator is 4500lb. If the current weight is larger than 4500lb, the
elevator will alert automatically. A Boolean signal comes from the maximum
weight detector and will be set to 1 whenever the maximum weight is exceeded.
The door of the elevator should not kept open for longer than 3 minutes.
Otherwise, it will close automatically. The door alert signal should normally
be low but go high whenever the door has been open for more than 3 minutes.
This door alert signal will be used by the mechanical part of the elevator to
issue a “close door” command. Whenever the door is open for more than 3
minutes, a blinking 30mA lamp will come on. This blinking will happen at a rate
of approximately 1 blink every 2 seconds. In addition, there is a sensor at each floor
to sense whether the elevator has passed the current floor. This sensor
provides a 3-bit Boolean signal that encodes the floor that has been passed. We
assumed we were given a 3-bit Boolean signal.
________________________________________________________________________________________________________________________________
EE 230 - Electronic Circuits & Systems
Electronic Thermometer/Warning Circuit
Design and test a temperature measuring/monitoring circuit. The circuit should use a thermocouple temperature sensor and associated circuitry that does the following:
- One output is a DC voltage that is an amplified version of the input voltage. When the TC is at 0°C, the output should be at 0V and when the TC is at 100°C, the output should be at 5V.
- The second output will be a steady green LED that is on for all temperatures below 40°C.
- The third output is warm-temperature indicator that will cause a yellow LED to blink at a rate of 2 Hz when the temperature is between 40°C.
- The fourth output is a high-temperature indicator that will cause a red LED to blink at 8 Hz when the temperature is above 80°C.
- You can use up to three DC power supplies to implement your circuit. (You should not need the function generator.)
- When completed, your circuit should have better than 5°C accuracy for each of the outputs.
________________________________________________________________________________________________________________________________
CprE 288 - Introduction to Embedded Systems
Mars Rover

The VORTEX platform will be placed at a random position in the test field. The rover should traverse through several hazards to position itself within the retrieval zone. This project is composed of three sub goals. In the test course these areas are marked off by IR beams. The rover should not to cross these beams. For the purpose of this test we can assume that the test course will be completely surrounded by IR beams. The iRobot Create platform has a sensor that can sense when it is approaching the irradiated areas.Mission control needs to be able to process the information that the VORTEX platform sends to it. We will format the information appropriately so that it can be understood by the operator.
